Aiding Frames
The Aiding Frame Configuration (0x13,0x01) command enables the user to mount an aiding sensor at a desired location on the vehicle and specify a frame for that sensor. The frame configuration employs a translation vector followed by a rotation in either Euler angles, quaternion, or DCM.
-
Enables user to configure relative translation and rotation for external aiding sensors
-
These frames account for the effect of vehicle geometry on external aiding measurements
Example: Configure external GNSS, downward facing radar, external magnetometer, optical flow sensor
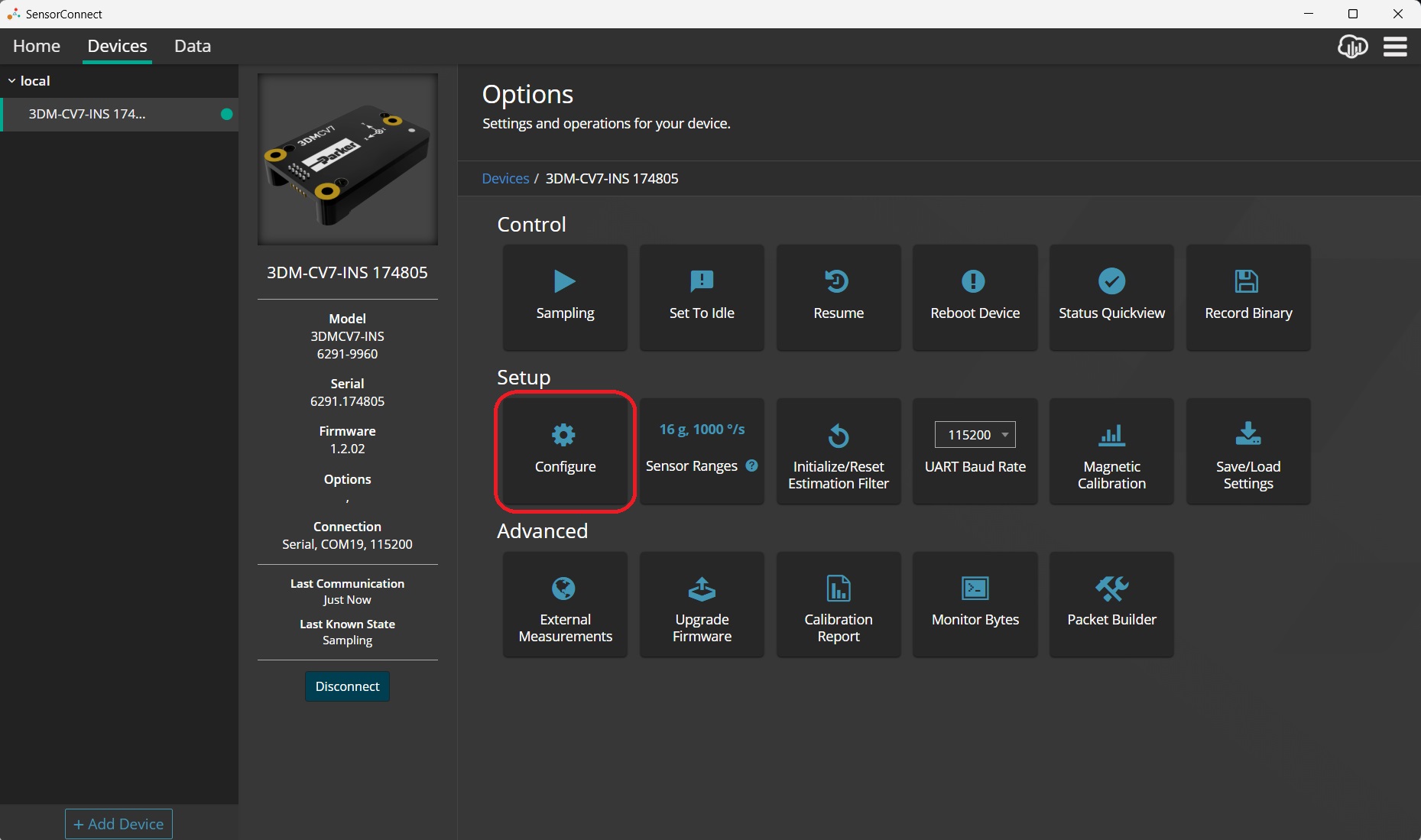
SensorConnect
-
Open SensorConnect
-
Connect the CV7-INS to your computer
-
Enter the Configure tile
-
-
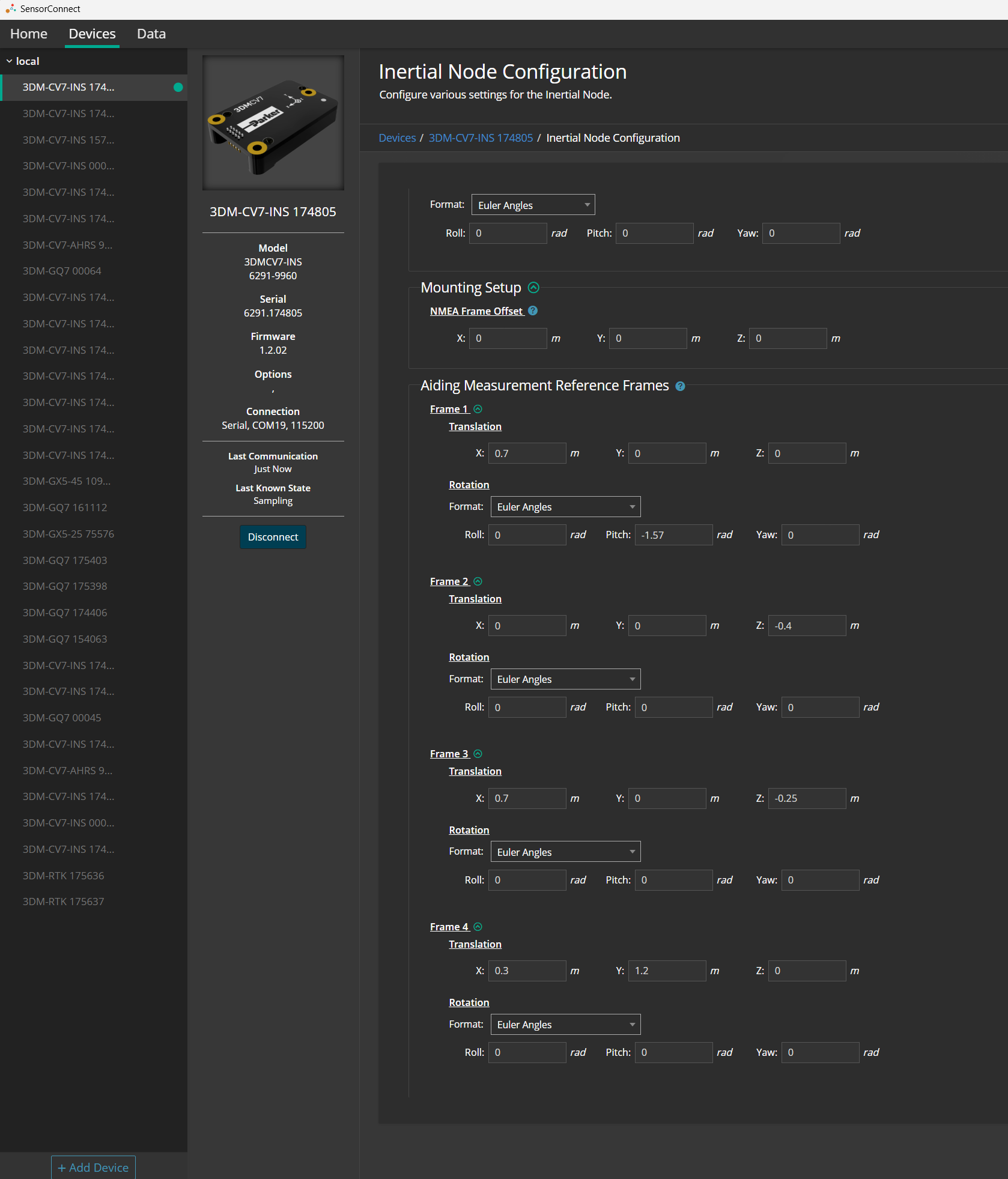
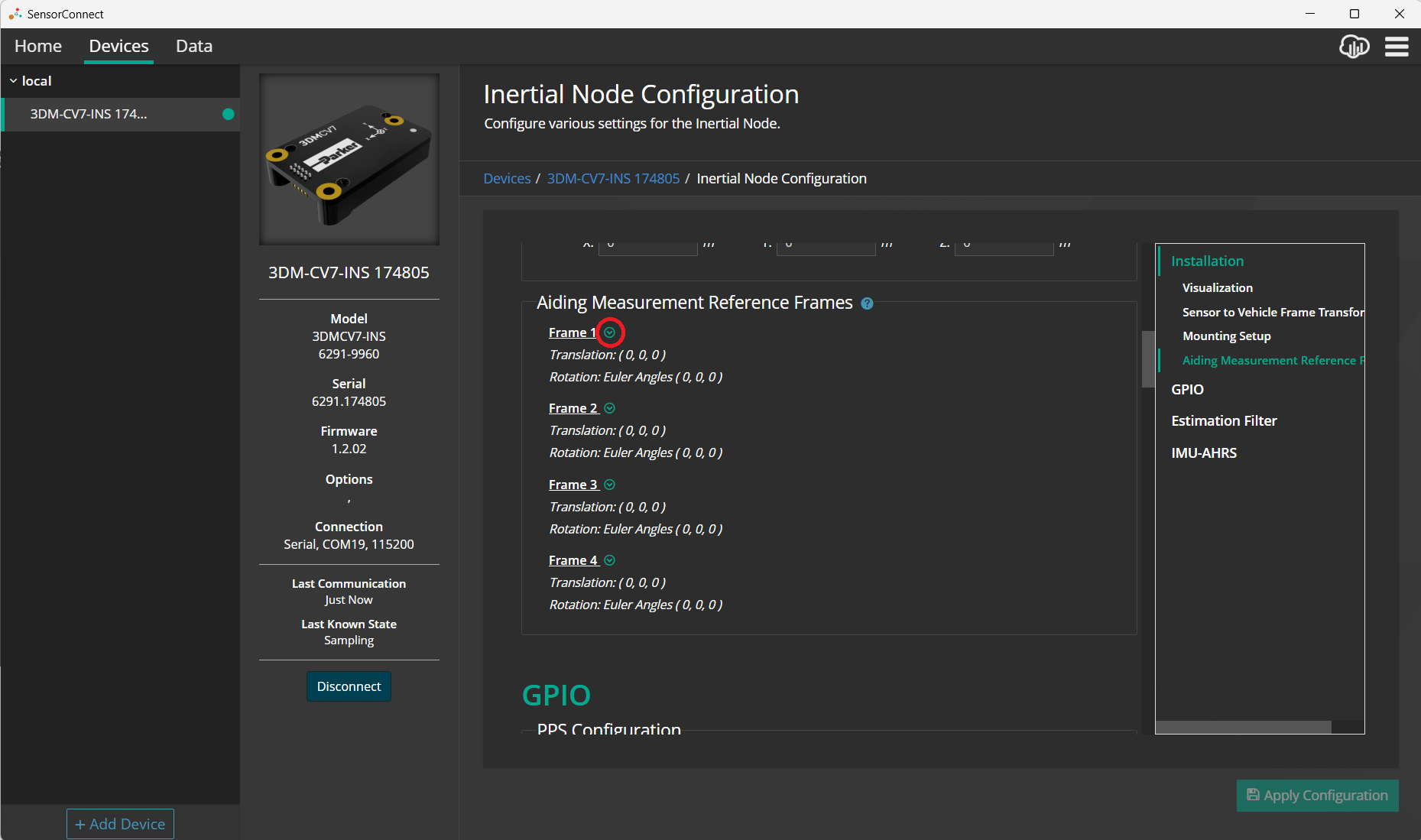
Scroll down to the Installation > Aiding Measurement Reference Frames section
-
Click the Frame 1 down carrot to show the aiding frame configuration fields
-
-
Assign each sensor a Sensor ID and a Aiding Frame as appropriate
-
Enter the Translation and Rotation for Sensor 1 in Frame 1, Sensor 2 in Frame 2, ...
-
-
-
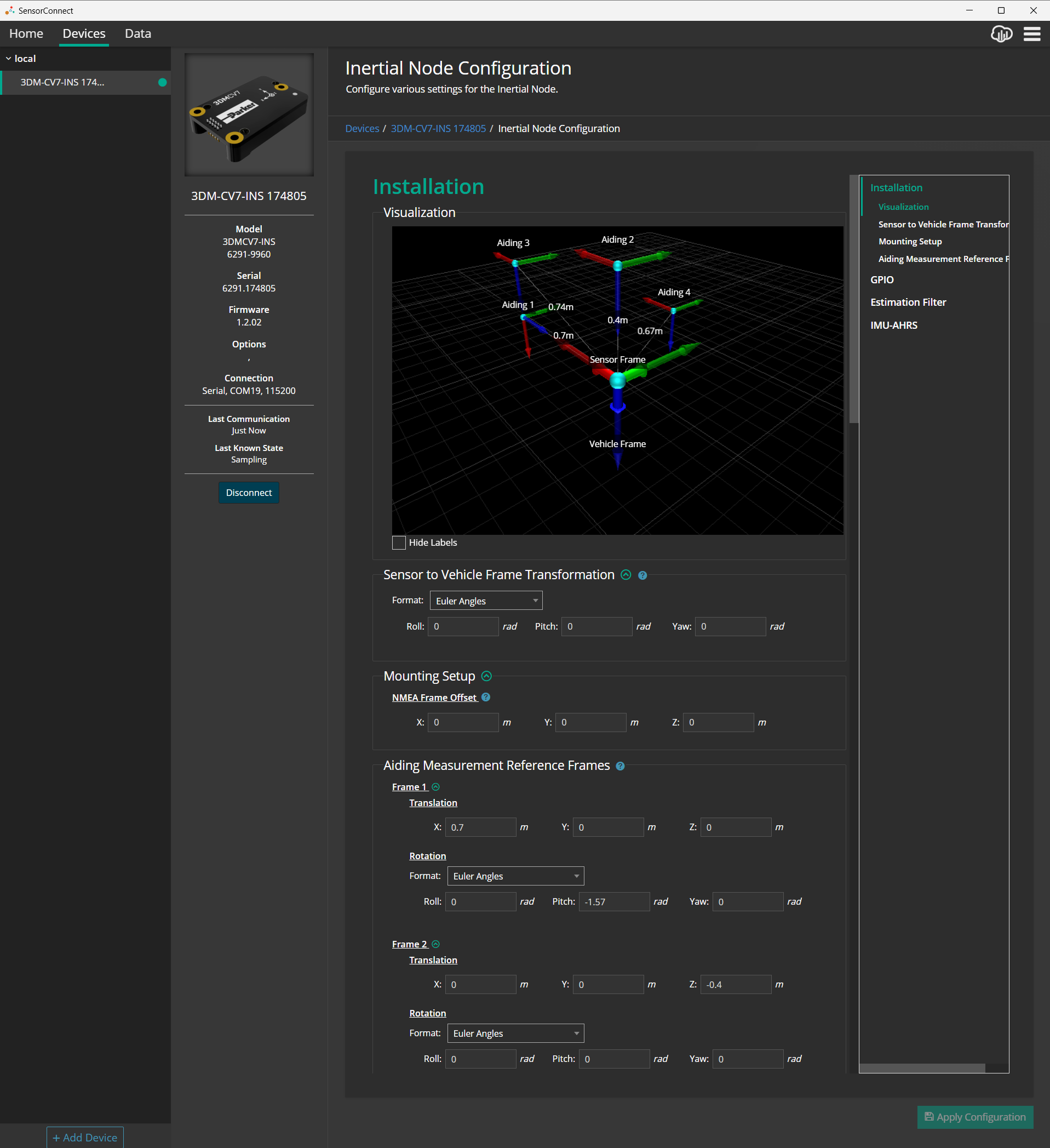
Verify the Translation and Rotation values are correct by scrolling up to view the Installation > Visualization window:
-
-
Click Apply Configuration
-
Save Settings to Non-Volatile Memory:
-
If you intend for this configuration to be persistent through power cycles or if the device will be power cycled before connecting to the external GNSS receiver, it is recommended to "save as startup settings" before removing power. This can be performed using the Device Settings (0x0C,0x30) command with the SAVE function selector. For instructions using other interface methods, refer to the FAQ: Do settings get erased from the CV7-INS if I unplug it?
-
-